
The first blog post in this series shared the top questions on electric vehicle design from attendees of SIMULIA PowerFLOW’s recent webinar, Aerodynamic Design for Electric Vehicles, hosted by Automotive Megatrends.
With more aggressive drag targets, EV design can actually promote aerodynamic design changes that increase vehicle soiling – which can obstruct the functioning of ADAS (autonomous driver assist systems). To balance the two most significant drivers in automotive design — electrification and autonomy – digital simulation of realistic wind, dirt, dust, water and ice early on in vehicle development helps engineering teams improve tradeoff decisions, visualize the performance impact of design decisions before prototypes are tested, and iterate on more designs – and more novel designs – faster and with more confidence than ever before.
The second round of Q&A with Exa’s webinar attendees is below. To hear the webinar, click here.
With the increase in autonomous systems like cameras and sensors and the need to keep these clean during vehicle operation, do you think functional design will be prioritized over aesthetic design?
Aesthetic design concerns do make the problem of vehicle soiling more difficult, and we do see electric and autonomous vehicles being designed more for function than aesthetics. And because soiling is now a higher priority for safety, it becomes a higher priority for design, as well.
Do you envision different types of sensors being used in different climates or areas where soiling is more likely because it is wetter and colder, or because it is drier and dustier – say, to use one sensor system in one area because it’s better-equipped to cope with that kind of soiling than it would be in another location?
Yes, this is likely to become a reality. For example, there are currently regulations in the EU for headlamps over 2000 lumens, because even a little dirt can impair optical features, creating glare. In the same way, once government regulations catch up, we expect there will be regulations on how sensors and cameras are designed, to keep them clean. Redundancy requirements could also emerge – so that if one system is obstructed, another can take over.

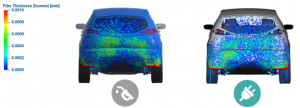
Has the PowerFLOW team collected any data on what soiling occurs where? It’s one thing to know that soiling exists – it’s another to go around and measure the soiling that is on vehicles that are actually on the road, to understand where that really is a problem.
The PowerFLOW team has collaborated with a number of its customers and has published a substantial number of papers with SAE where we have done just that. We have done climatic tunnel testing, where we’ve generated water, and on-road testing, where we drive around tracks and we’ve had dirt deposit; we’ve also had customers that have looked at the difference between water, dirty water, and dust, and looked at the different soiling patterns that you get from driving on a track, and what that resulting soiling pattern is – and all three of those would be different. We do have that type of data, and we do have the ability to reproduce those types of situations using simulation.
Also, there are a number of test cases in the vehicle development process where they have to pass certain tests that are standardized, so one feature that we offer in our simulations is to reproduce those tests so we’re predicting their results.
Sensors are still going to get dirty in some way. Can you discuss the ways that vehicle manufacturers and suppliers can keep those sensors clean, as opposed to preventing them from getting dirty in the first place – or both?
For keeping them clean, one option is to have a sprayer pop-out system, where water is sprayed on them to clear the obstruction. You can try and shield them with surrounding shielding that prevents air from hitting it – but there are limitations on that because you would also be restricting the viewing window of the system. There are also systems to blow air on the sensor, continuously, to protect it; and there are others where they have a blinking lens to keep obstructions out of the system. You can also introduce a coating on the lens system itself to prevent it from certain types of soiling or contaminants, at least for a certain amount of time. And finally there are wiping systems, similar to windshield wipers or headlamp wipers, to clear any obstruction or contaminant.
Does simulation work with sensor cleaning systems?
We have several customers that are currently interested in ensuring that their spray systems will hit the target independent of vehicle speed, and we work with them along with the OEMs to get them working in the real installed conditions as much as possible.

Do you envision different types of sensors being used in different climates or areas where soiling is more likely because it is wetter and colder, or because it is drier and dustier – say, to use one sensor system in one area because it’s better-equipped to cope with that kind of soiling than it would be in another location?
We definitely expect that. It’ll be a tradeoff between performance and cost of the sensor. For example, on the rear bumper, you could be making a decision between ultrasonic sensor vs. a radar sensor, and the radar sensor would be less susceptible to deposits of dirt and mud and snow, but it would cost more than the ultrasonic sensor, for example. There might even be a situation where you have both, if it’s really critical to operate in more environments, or where some could be more used in certain types of
Already, you’re seeing a lot more autonomous vehicles in off-highway situations, for mining operations for example, and those systems will have three different kinds of sensors – an optical one, which would be a lidar or a camera-based system which are both a lot more susceptible to contaminants, and then they’ll fall back eventually to a radar system in the end – but at each time that they lose one of those systems, they have to reduce their operating speed because the optical sensors are going to give you the best environment picture, and allow you to have the most confidence in your operating conditions.
The sensors that are currently located on a non-autonomous vehicle are a human’s eyes and ears, and they are located so that they have great visibility out through the windshield, with wipers and defrosters to help preserve their view. Is that not the best place to locate a sensors?
We’re seeing a lot of that already – where cameras are being put in behind the rearview mirror so it’s in a similar position to the driver. Other camera and sensor placement takes advantage of the cleaning systems on the headlamps by putting cameras in the lamp housing. But at the same time, for the cross-traffic cameras for example, you’d get a lot more visibility if you were allowed to put a camera at the back of the vehicle – which in fact would give you better visibility than the human driver. So – yes and no.
Is possible that the problem of keeping sensors clean is one that technology will overcome soon – that there may be sensors in the near future that work regardless?
Future improvements in coatings and other technology will definitely help reduce concerns about water, but there will always be different kinds of contaminants that are much harder to clean, that will make it more difficult. While it is a problem of the “here and now” for water management, there will always be other considerations. Sensors will always degrade in performance if they have something blocking them.
Can you speak to the role of regulation in autonomous vehicle development and soiling of sensors and other devices?
Safety is always a concern in terms of regulations and competitive advantage. Which of the autonomous vehicles in the future has the best safety ratings will play a large part in gaining market share with consumers and meeting government regulations for safety of autonomous vehicles to protect consumers. Safety is non-negotiable: you have to put safety first.
Want to learn more about Dassault Systèmes’ simulation solutions for electric vehicles? Visit: go.3ds.com/TrustTheDrive
Curious about how we are solving electric and autonomous vehicle challenges? Check out our infographic.

Fabien Letailleur is a Senior Consultant for the SIMULIA brand. He is focused on developing the messaging to bring SIMULIA solutions to the market within the context of Dassault Systèmes’ broader portfolio of industry solutions. In this role, he’s articulating the value of SIMULIA technology and how it can benefit a wide audience of users---from simulation experts to engineers, to decision-makers. Fabien joined Dassault Systèmes in 2007 with an FEA-oriented Master’s Degree in Mechanical Engineering from the University of Technology in Troyes, France. He is based at SIMULIA's headquarters near Providence, RI.