
You hear and read a lot about autonomous driving, wireless communication, the introduction of 5G technology, network coverage all over the country and super-fast data transfer. Almost every day you get the latest news dealing with ever-new applications that will provide us with all these technical innovations, including the Internet of Everything (IoE). The question is, how do these systems actually work, and what challenges must development engineers deal with today to achieve the goal of fully automatic driving?
Let us first look at wireless data transfer. If a vehicle has obtained important information about the traffic situation, road conditions or an accident with the help of various sensors, these should be communicated to other vehicles and central control centers. In order to ensure this, antennas are needed that meet specific requirements and have been optimized with regard to a given frequency band or intended placement on the vehicle. The antenna experts do not enjoy full freedom when choosing the antenna system, because stringent design concepts, cost pressure, installation specifications or environmental influences such as splashing water, ice and snow severely restrict the selection options. Added to this is the wide variety of vehicles being delivered, for example, with or without sunroof and partly with different electronic equipment.
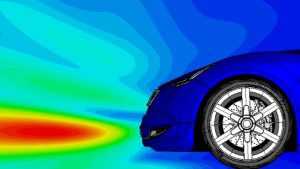
The automobile – a computer on four wheels
The selection, design and placement of antennas and sensors are each crucial for smooth communication. When it comes to efficiency, the focus is always on the overall system, because many decisions have to be made in line with other departments. Modern automobiles resemble computers on four wheels whose electrical and electronic components must integrate into the mechanical environment of the vehicle. Thus, an electromagnetic simulation approach alone is not sufficient, as structural-mechanical boundary conditions must be included in the analysis as well as the dynamic behavior of the automobile in real time or contamination of sensors when driving through mud and water.
Undisturbed communication with the (urban) environment
If all requirements are met, it is still important to ensure the electromagnetic compatibility of all electronic systems and antennas. Modern vehicles include dozens of controllers, actuators, sensors and antennas that need to interact without interference. Furthermore, the multipath propagation of radio signals in the urban environment requires precise calculations as well as multiple input multiple output (MIMO) analyses with several antennas used in parallel. Such systems make it possible to generate spatial footprints of the environment, which are particularly advantageous in situations where there is no direct line of sight between transmitter and receiver. A typical application example would be an urban canyon in which two vehicles without intervisibility move directly towards each other and communicate by radio to each other their mutual positions and directions of travel to avoid collision.
How do vehicle sensors see the world?
While it is relatively easy to imagine how a video camera system works, LIDAR and RADAR require a certain degree of abstraction to understand in which way the reflected electromagnetic signals can be used to generate an image of the real environment. In fact, the quality and reliability of RADAR sensors are very much dependent on how and where they are mounted on the vehicle. Electromagnetic stray signals within the car body as well as dirt or jolting can make it difficult to correctly determine the distance, position and type of potential collision objects. Simulation offers the particular advantage that variant diversity, environmental influences and quality fluctuations can be predicted and evaluated and appropriate measures can be taken without requiring time- and cost-intensive prototype development.
Virtual test drives
The simulation of autonomous vehicles (AV) as a substitute for real test drives is not a radically new idea. GM predicted that 95% of future AV tests would be virtual, not physical. This is not surprising in view of the billions of test kilometers that are generally considered necessary before fully self-driving cars can be put on the road. Manufacturers see significant cost and time savings by using simulations in an early design process to identify and better understand hazardous traffic scenarios and vehicle-facing issues.
It takes some time and further development for cars to move autonomously and collision-free in all traffic situations, but Dassault Systèmes has already paved the way with many innovative ideas to provide suitable physical solutions for each subsystem and the user in the transmission support in real-time simulation scenarios. This significantly reduces development times from conception to the finished product.
Find out more about how simulation offers an advantage when studying electromagnetic systems, signals and antennas, without requiring time- and cost-intensive prototype development, here.

Matthias Tröscher is a SIMULIA Senior Business Development Executive, focusing on EM simulation in the automotive industry. He studied physics at the Technical University in Munich and received his doctorate in 2000 from the Johannes Kepler University Linz for his work on radar warning systems carried out for BMW. Matthias Tröscher has worked at CST since 2009 before he joined DS SIMULIA in 2019. He is Senior Member of the IEEE EMC Society, Vice Chairman of the IEEE German EMC Chapter and Chair of the IEEE Technical Committee TC-9 for Computational Electromagnetics.