
이번 포스팅에서는 Abaqus에서 유용하게 사용할 수 있는 Linear Dynamics 에서 Base motion을 이용한 해석에 대하여 살펴보겠습니다. 작년에는 경주에서 발생한 지진으로 많은 이슈가 되었습니다. 지금도 여진의 뉴스가 간혹 나오고 있습니다. 이로 인해 반도체, 디스플레이 제조업체나 발전소, 정밀 계측 장치를 활용하는 연구소 등 에서 지진의 영향에 대하여 관심을 많이 가지게 되었습니다. Base motion 을 이용한다면 바닥이나 다른 가진원에 의한 가진에 대하여 시스템의 선형적인 응답을 빠르게 구할 수 있게 됩니다.
지진이 아니더라도 도로와 인접한 곳에서는 차량의 이동으로 인한 가진, 다른 층에서 사람이나 기구들의 이동, 공조기와 같은 가진원이나 심지어는 고층 건물의 경우 바람의 영향등 다양한 가진원으로 인해 건물이 움직이게 됩니다. 이때 진동을 계측하여 진동으로 인한 환경 평가를 할 수 있는데 진동의 RMS 값을 이용하여 다음과 같은 진동 수준을 평가하기도 합니다.
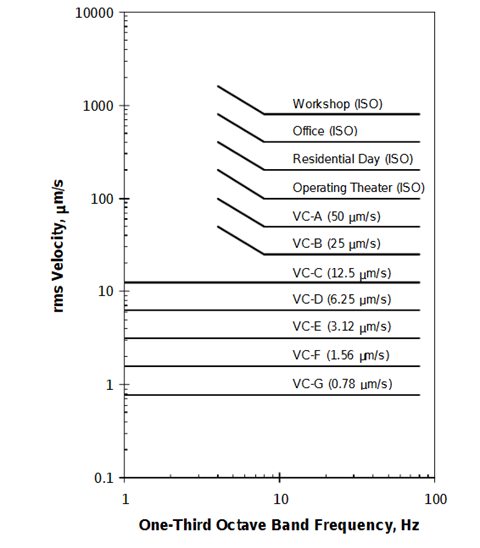
VC 는 Vibration Criteria 입니다. 산업계의 경우, 수 미크론 급을 측정해야 하거나 정밀 계측 장비나 LCD 와 같은 디스플레이 설비는 대략 VC-C ~ VC-D 정도 수준의 진동 환경이 필요합니다. E class(VC-E) 정도는 나노급 정밀도가 요구되는 반도체 설비가 필요로 하는 진동 환경입니다. F 클래스 이상은 진동이 거의 없는 환경이기도 하지만, 구현하기 위해서 많은 비용이 들고 유지하기도 어려운 면이 있기 때문에 양산용 환경으로 구현하기는 어렵다고 보시면 될 것 같습니다. 비용보다는 정밀도가 더 중요한 인공 위성이나 천문 관측용 렌즈 등을 제작할 때 필요한 환경입니다. 특별히 진동에 민감한 설비가 있다면, 장비 설치전에 설치 위치의 진동 수준을 평가하는 것도 대단히 중요할 수 있습니다.

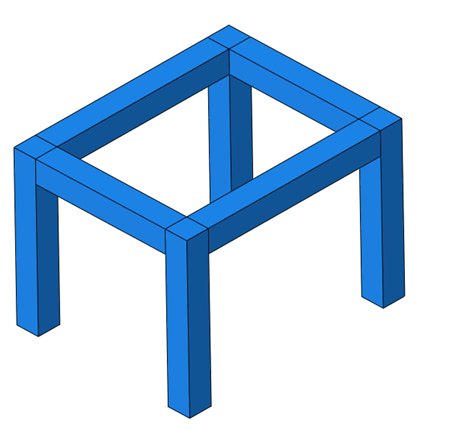
이번 블로그의 주제와 같이 측정된 바닥 시그널을 통해 시스템의 응답을 예측하는 것이 필요할 수 있습니다. 이를 위해 지진과 같이 바닥이나 경계조건이 흔들릴 경우 전체 시스템을 FEM 모델로 구성하고 Direct Transient Dynamic 을 고려하여 해석 할 수 도 있습니다만 해석에 많은 자원을 요구합니다. 따라서, 시스템의 고유 모드와 진동수를 구하여 모드 중첩법을 사용하여 응답을 계산하는 방법은 빠르게 비교적 정확한 해를 얻을 수 있는 방법이 많이 사용됩니다. 지금부터는 Abaqus 에서 Base motion 을 사용하여 시간 도메인 영역에서 응답 해석을 하는 방법을 소개하고자 합니다. Base motion 은 경계 조건에 변위/속도/가속도의 가진(excitation) 조건을 부여하기 위한 방법입니다. 동적 해석에서 경계 조건에 변위/속도/가속도로 부여하게 되면 하중을 알 수 없기 때문에 고주파수의 노이즈가 성분이 포함되게 됩니다. 단순하게, F=ma 에서 가속도는 알지만 질량이 없기 때문에 대상에 전달되는 힘을 알 수 없기 때문입니다. 따라서, 일반적으로는 Big Mass 방법을 사용하여 가진 대상의 10^5 ~10^6 의 임의의 질량을 부여하고 절점에 부여하고 이를 가진하는 방법을 사용하였습니다. 이를 통해 가진하는 힘을 알수도 있습니다. Base motion 에는 Primary base motion 이 있고, secondary Base motion 이 있습니다. Primary base motion 은 Big Mass 방법이 아니고 Modal participation method 방법을 사용하여 강체 모드를 제거하고 유연체 모드만을 고려하여 대상체가 어떻게 응답이 되는지 계산하는 방법입니다. 고정되어 있는 경계 조건에서 같은 가진 신호가 들어올 때 사용할 수 있습니다. 즉, 지진 혹은 이와 유사한 대단히 큰 힘으로 시스템 전체를 가진하는 경우, 쉽게 측정할 수 있는 가속도를 바탕으로 해석으로 시스템의 흔들림을 예상할 때 유용하게 사용할 수 있습니다. 참고로, Primary base motion 은 1개만 적용할 수 있고 가장 우선적으로 적용됩니다. 하지만, 대상체에 다양한 가진이 적용될 수 있습니다. 예컨데, 거대한 다리와 같은 구조물에서는 지진이 발생하더라도 교각 마다 시간차가 인해 다른 가진이 적용될 것입니다. 차량이 과속 방지턱을 만나게 되면 앞 바퀴와 뒷바퀴에 가진이 시간차에 의해 발생하기 때문에 같은 시그널이지만 시간 차를 두고 입력해야 하는 것도 마찬가지입니다. 디젤 엔진으로 구동되는 열차를 예를 들면, 레일에서 발생하는 가진과 엔진에서 나오는 진동등의 서로 다른 가진원이 있고 이를 모두 고려하고 싶은 경우도 있습니다. 이런 경우 primay base motion 외에 추가되는 가진원을 고려하기 위한 방법이 Secondary base motion 입니다. Secondary base motion 은 Big mass 방법을 사용합니다. Abaqus 에서는 Secondary base motion 이라고 꼭 2번째 Base motion 만 사용할 수 있는 것은 아니고 서로 다른 여러 개의 Secondary base motion을 사용할 수도 있습니다. 지금부터는 간단하게 Abaqus 에서 Base motion 을 사용한 해석 방법을 알아보도록 하겠습니다. 가상의 설비를 아래와 같이 간단하게 프레임으로 만든 형상으로 모사하겠습니다.
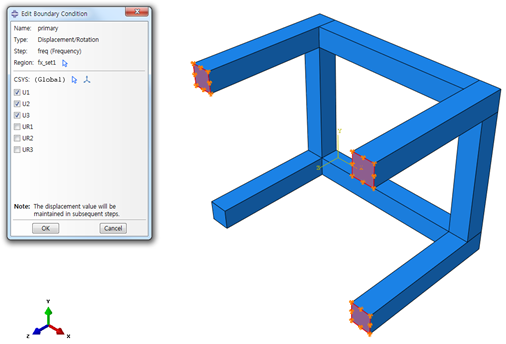
Base motion 을 사용한 해석 방법은 modal superposition 을 사용하기 때문에 반드시 고유진동 해석을 하고 (step1 , frequency), 이후에 가진 해석(step2, modal dynamics) 을 수행합니다. Step 1 은 Linear perturbation 에 있는 Frequency 해석 Step입니다. 여기서는 사용자가 원하는 주파수 범위나 모드 범위를 지정하고 고유 진동 해석 Step을 정의합니다. 주의할 점은 상한 주파수 범위는 원하는 대로 지정할 수 있으나 하한 범위를 지정하면 안된다는 것입니다. 저주파수 영역이 응답에 주는 영향이 크기 때문입니다. 상한 주파수 범위도 완전하게 임의로 지정하기 보다는 Aliasing 을 피하기 위해 관심 주파수의 최소 3배 이상, 가능하면 5배 이상을 지정해 주는 것이 좋습니다. Step 설정이 다 되었다면 다음 Load 모듈에서 경계 조건에서 가진되는 위치를 Fixed 경계 조건으로 지정합니다. 프레임의 다리 4개 중에서 3곳에 고정 경계조건을 부여하겠습니다. 이 위치는 Step 2 에서 Primary base motion이 적용되게 가진 되는 위치입니다. 자유도는 Modal Dynamics Step에서 가진을 하고자 하는 방향을 포함해야 합니다.
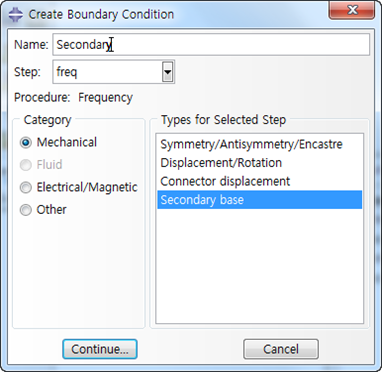
만약에 Secondary Base motion 을 적용하고 싶다면 경계 조건에서 Secondary Base motion 경계 조건을 만들고 위치를 지정합니다. 위의 예제에 4개의 다리 중 Primary 로 지정되지 않은 남은 한 곳에 Secondary base motion 경계 조건을 지정해 보겠습니다. 마찬가지로 가진하고자 하는 방향을 포함하여 자유도를 선택합니다. 경계 조건에서 Secondary base 를 선택합니다.

Step 2 에서는 modal dynamics Step을 지정합니다. 가진할 시간과 time increment 를 지정합니다. 가진 할 시간은 사용자가 필요한 만큼 지정하면 되고 실제 시간을 의미합니다. Time increment 는 마찬가지로 Aliasing 을 피할 수 있을 만큼 충분히 작게 주어야 합니다. 0.001 로 지정하였다면 1000Hz의 1/5인 대략 200Hz 정도까지의 주파수 영향은 볼 수 있다고 보시면 됩니다.
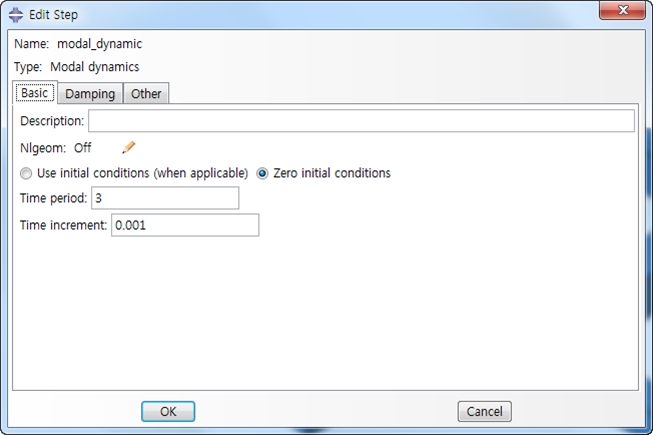
댐핑 탭에서 시스템의 응답이 발산하지 않도록 댐핑을 지정합니다.

Primary Base motion 에 가진할 Amplitude 를 만듭니다. 만약에 Secondary base motion 이 있다면 Amplitude 가 더 필요할 수도 있을 것 같습니다. 여기서는 조화 가진 성분의 Amplitude 를 만들어 보겠습니다.
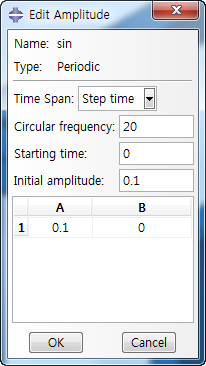
위 그림은 Primary base motion 을 위해 설정한 20Hz 의 가진 신호입니다.
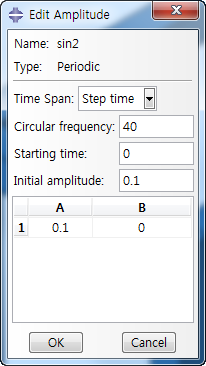
같은 amplitude 를 가지는 Secondary base motion 을 위한 40Hz 의 가진 신호입니다. Amplitude 를 만들었다면, Load 모듈에서 새로운 경계조건을 만듭니다.
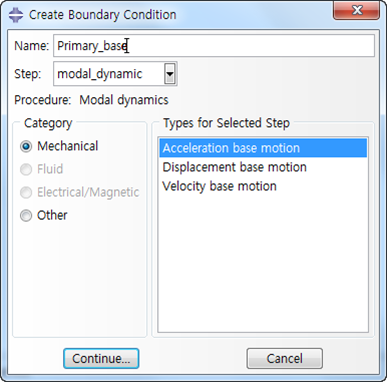
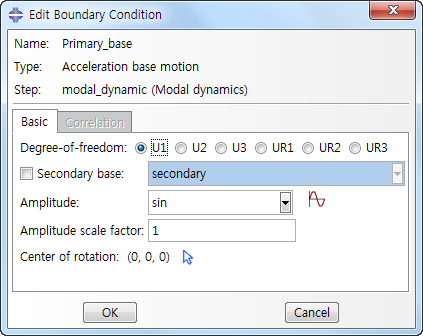
경계 조건에서 Base motion 을 선택하고 변위/속도/가속도중 맞는 타입을 선택하고 Amplitude 를 지정합니다. 여기서는 Acceleration base motion 을 입력해 보겠습니다. 창에서는 가진 방향(Degree-of -freedom), 그리고 미리 Amplitude(Sin)를 선택합니다. Scale 은 Amplitude 에 곱해질 상수입니다. Amplitude 를 그대로 사용한다면 1을 입력하면 됩니다. Primary Base motion 이 가해질 위치는 별도로 지정하지 않아도 자동으로 step 1 에서 지정한 고정 경계 조건에 적용됩니다.
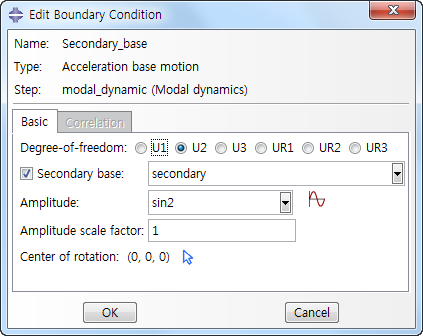
Secondary base motion 은 아래 그림과 같이 중간에 Secondary base motion 옵션을 선택하고 Frequency Step에서 만든 Secondary base motion 를 선택합니다. Secondary base motion 은 여러 개를 만들었다면 여러 개 중 선택할 수 있습니다. 마찬가지로 가진 방향(Degree-of-freedom)amplitude 를 입력합니다. Primary base motion 과 구분을 위해 가진 방향을 U2 로 설정하였습니다. Amplitude 는 미리 만들어 놓은 sin2 를 선택하였습니다.
이것으로 대략적인 설정은 끝났고 이제 해석을 수행할 수 있습니다. 해석 결과는 블로그 마지막에 있는 동영상을 참고하시면 될 것 같습니다. 프레임의 3개의 다리는 X 방향으로 동일하게 움직이고 1개는 Y 방향으로 움직이며 입력한 경계조건이 잘 입력 된 것을 확인할 수 있습니다. 가속도 상에서 동영상과 같은 결과를 얻기 위해서는 Visualization 모듈에서 Display 할 변수로 TA 즉 Total Acceleration 을 선택합니다. A (Acceleration) 를 선택하는 경우 Primary Base motion 을 계산하는 알고리즘으로 인해 시스템 전체를 움직이는 Rigid motion 을 제거하고 시스템 내부의 진동만 화면상에 결과를 보여주기 때문에 바닥이 고정되어 있는 것처럼 보입니다.

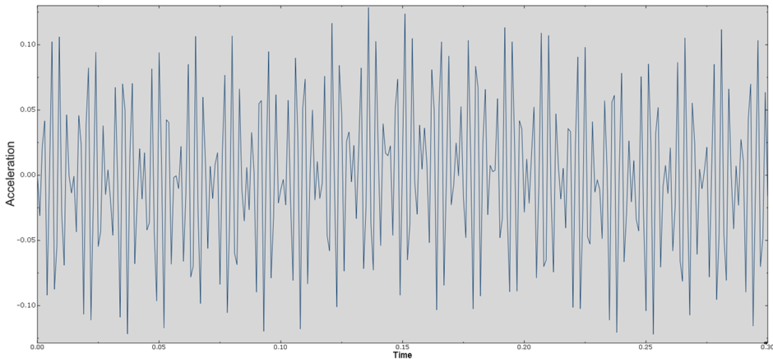
History output 에서 관심 위치의 가속도를 기록하는 것을 지정하였다면 아래처럼 가속도 프로파일도 볼 수 있습니다.
마지막으로 Primary Base motion 과 Secondary Base motion을 정의한 프레임의 해석 결과를 동영상으로 보시겠습니다.
이것으로 Abaqus 를 이용한 Base motion 해석 방법을 소개를 마무리 하겠습니다. 감사합니다. 시뮬리아 아바쿠스 SIMULIA ABAQUS