

성공적인 UAS 설계를 위한 End to End 설계 프로세스를 지원하는 3DEXPERIENCE Platform
본 포스트는 다쏘시스템의 김병균 컨설턴트, 김영주 컨설턴트, 이상훈 컨설턴트가 공동집필했습니다.
UAS(무인항공기 시스템, UAV System) 설계에 왜 시스템 엔지니어링이 필요할까요?

Figure 1 – UAV
UAS는 흔히 드론이라 불리는 UAV(무인항공기, Unmanned Aerial Vehicles)와 관련된 시스템 전반을 통칭합니다. 대표적인 UAV 모델인 멀티콥터와 고정익 항공기는 각각의 장단점이 뚜렷합니다.
멀티콥터는 수직으로 이착륙이 가능해 작동이 쉬워 안정적인 비행과 호버링이 가능하지만, 내구성과 순항 속도가 제한적입니다. 반면, 고정익 항공기는 공기 역학적으로 효율적이지만 이륙 및 착륙에 제한이 있습니다. 이 두 가지 모델의 다른 아키텍처의 장점을 모은 UAS를 유연하게 설계하기 위해서는 강력하고 혁신적인 시스템 엔지니어링 도구가 필요합니다.
성공적인 UAS 설계의 시작, ‘RFLP’
RFLP (Requirement, Function, Logic, Physical)
3DEXPERIENCE Platform의 시스템 엔지니어링(System Engineering) 모듈은 RFLP기반의 End to End 설계 프로세스를 지원합니다. RFLP는 모델 기반 시스템 엔지니어링 프로세스를 지원하는 프레임워크로 아래 4가지 기본 요소가 포함되어 있는 통합 시스템 정의입니다.
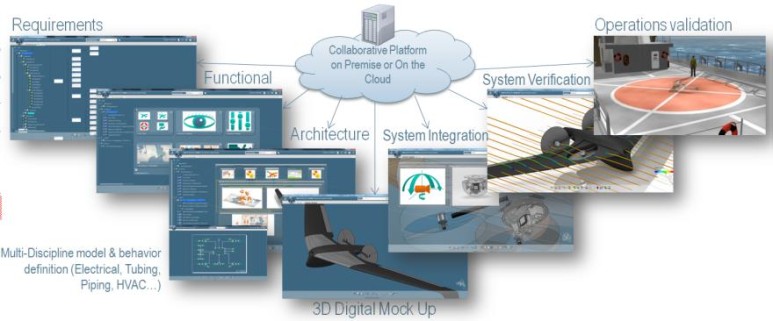
● 요구 사항(Requirement): 이해관계자들로부터 전달받는 제품 요구사항을 나타냅니다. 시스템 단위의 기능과
설계에 이르기까지 모든 정보는 요구사항을 시작으로 연계됩니다.
● 기능(Function): 기능과 흐름이 있는 아키텍처로, 시스템 단위에서 동작하는 서비스 또는 기능을 나타냅니다.
● 논리(Logic): 구성 요소 아키텍처와 구성 요소의 기능들 간의 흐름을 연결하는 인터페이스를 나타냅니다.
● 물리적 설계(Physical): 물리적으로 구성되는 시스템 요소를 정의합니다. 기계, 전기, 유체학 등 여러 분야의 3D
모델링을 포함합니다.
3DEXPERIENCE Platform의 RFLP 요소들은 다음과 같은 프로세스로 UAS 설계를 지원합니다.
1. 3D Model

Figure 2 – 3D Design Template 활용 예
3DEXPERIENCE Platform은 제품 외관 디자인을 설계하기 위해 3D Design Template 세트를 제공합니다. 다양한 3D Design Template을 통해 CFD분석, Lay-out, 장비 및 탑재 공간 연구, 무게 중심 분석 등 매개변수를 활용한 빠른 설계가 가능합니다.
2. 프로펠러, 전동기, 배터리
프로펠러 동작의 역학 실험을 위해 시스템 설계와 회전속도, 토크 및 추력 계산을 위한 방정식을 구현합니다. SmartElectricDrive 라이브러리는 고정 정지, 과도 및 BLDC 3가지 수준의 정확도로 동일한 논리 시스템에 연결되며, 구성 요소, 시뮬레이션에 사용되는 모델은 런타임에 따라 선택됩니다.
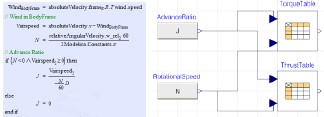
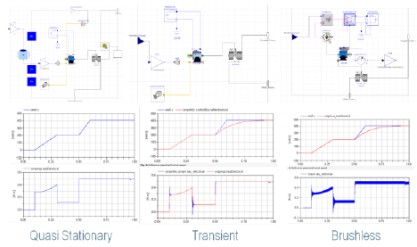
Figure 3 – 실험데이터 기반 프로펠러 모델 / Figure 4 – Modelica 모델 및 동적 응답
3. 비행 관리 시스템
멀티콥터 안정화는 관성 측정 장치에 민감하게 반응하는 것으로 알려져 있습니다. 그렇기 때문에 정확도 및 지연 (자이로스코프 및 가속도계 센서의 일반적인 재생 빈도는 200 ~ 400HZ) 및 모터 ESC 재생률 (50 ~ 400HZ 이상)을 여러 단계에서 올바르게 모델링 하는 것이 중요합니다.
센서 노이즈, 양자화 및 바이어스 외에도 제어 루프, 하이브리드 이산/연속 해결 기능은 PID, 노이즈, 필터 모델을 제공하는 LinearSystem2 라이브러리 전체 또는 개체 단위로 연속 이산으로 쉽게 전환할 수 있습니다.
6. 3D 가상 환경 검증
3DEXPERIENCE CATIA는 TCP 소켓을 사용하여 FMU를 통해 3DVIA에 연결됩니다. CATIA로 UAV의 위치와 동작 및 추가 정보를 주기적으로 전송하여 가상 환경에서 UAV의 동작을 3D 애니메이션으로 검증할 수 있습니다.
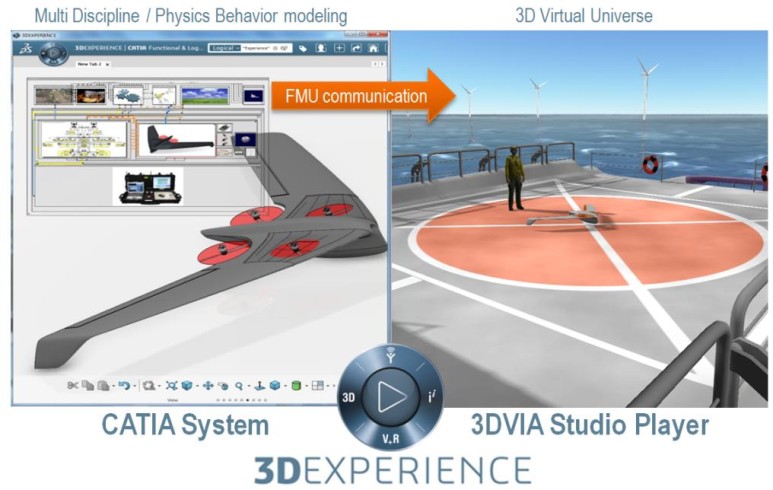
Figure 8 – 3D 가상 동작 검증
UAS 개발을 위한 시스템 엔지니어링의 모든 단계를 동일한 환경에서!
포괄적인 RFLP 기반 End to End 프레임워크를 제공하는 3DEXPERIENCE Platform은 복잡한 다분야 시스템 엔지니어링 프로세스와 개발, 설계, 해석, 검증의 모든 단계를 동일한 환경에서 경험할 수 있게 합니다. 또한 막강한 모델링 기능으로 사용자 경험의 용이성과 유동성으로 생각할 수 없는 창의력을 발휘하는 데 도움을 줄 수 있기에 다쏘시스템 3DEXPERIENCE Platform은 성공적인 UAS 설계를 위한 가장 효율적인 플랫폼이 될 것입니다.
[드론 세계 탐구] #2 난류 모델 해석부터 3D 프린팅까지 – Multi-physics 시뮬레이션
다쏘시스템 전문가와 상담하기:
https://www.3ds.com/ko/how-to-buy/contact-sales
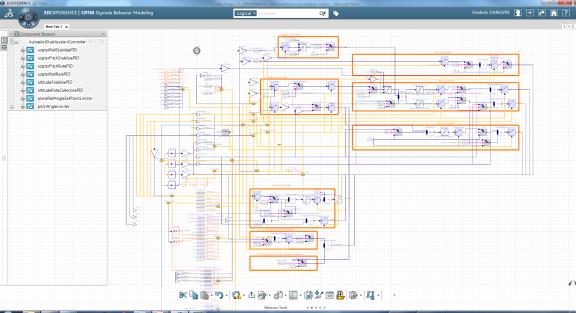
Figure 5 – 하이브리드 멀티 콥터 – 고정익 안정화 제어법
4. 유체 역학 해석 (CFD)

Figure 6 – 3DEXPERIENCE Platform의 3D부터 CFD까지 시스템 시뮬레이션
3DEXPERIENCE Platform의 SIMULIA Fluid Scenario App은 다양한 속도로 비행 영역을 탐색하는 데 사용됩니다. 비행 각도, 측면 슬립 각도 및 엔진 도어 위치 최적화를 위해 Modelica 비행 역학 모델을 사용합니다.
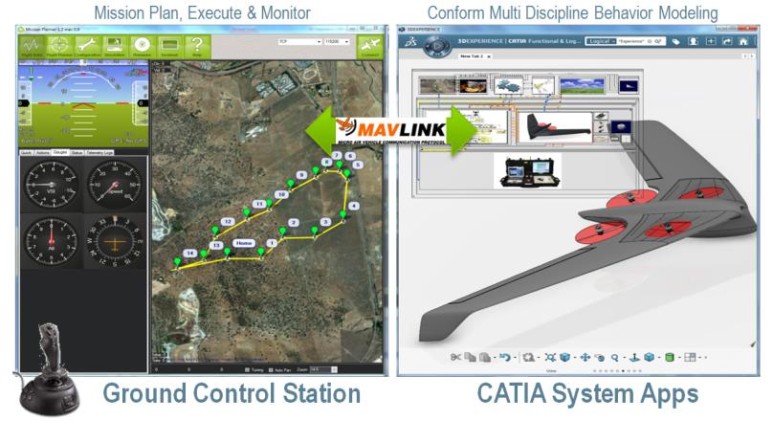
5. Ground Control Station (GCS)
GCS는 지상에서 작동하여 UAV를 원격으로 제어하는 소프트웨어입니다. UAV 시스템 매개 변수 및 상태를 모니터링하여 UAV에 임무를 보내는 UDP 기반입니다. 무인 항공기 UDP 네트워킹을 제공하기 위해 FMU 모델을 사용할 수 있습니다.
6. 3D 가상 환경 검증
3DEXPERIENCE CATIA는 TCP 소켓을 사용하여 FMU를 통해 3DVIA에 연결됩니다. CATIA로 UAV의 위치와 동작 및 추가 정보를 주기적으로 전송하여 가상 환경에서 UAV의 동작을 3D 애니메이션으로 검증할 수 있습니다.
Figure 8 – 3D 가상 동작 검증
UAS 개발을 위한 시스템 엔지니어링의 모든 단계를 동일한 환경에서!
포괄적인 RFLP 기반 End to End 프레임워크를 제공하는 3DEXPERIENCE Platform은 복잡한 다분야 시스템 엔지니어링 프로세스와 개발, 설계, 해석, 검증의 모든 단계를 동일한 환경에서 경험할 수 있게 합니다. 또한 막강한 모델링 기능으로 사용자 경험의 용이성과 유동성으로 생각할 수 없는 창의력을 발휘하는 데 도움을 줄 수 있기에 다쏘시스템 3DEXPERIENCE Platform은 성공적인 UAS 설계를 위한 가장 효율적인 플랫폼이 될 것입니다.
[드론 세계 탐구] #2 난류 모델 해석부터 3D 프린팅까지 – Multi-physics 시뮬레이션
다쏘시스템 전문가와 상담하기: